|
Calibration and registration techniques are important tools in robotics. There have been many techniques that have been developed which include both closed form solutions and iterative solutions. This website will concentrate on closed form solutions that are commonly used in robotics. Though many of the following solutions have weighted solutions (that weight certain points more than others), this website will concentrate on unweighted closed form solutions. The solutions will be presented as m-files suitable for MATLAB. For a review of many of these algorithms, please check out M. Shah, R. D. Eastman, T. Hong, An Overview of Robot-Sensor Calibration Methods for Evaluation of Perception Systems, Performance Metrics for Intelligent Systems, (2012). I would be interested in hearing from you if you found these algorithms useful, find any bugs, or have any suggestions, questions, or problems. Please email me at "mili at cooper dot edu." We will split these techniques into three categories: * Registering Two Sets of 3DoF Data * Registering Two Sets of 6DoF Data with 1 Unknown * Registering Two Sets of 6DoF Data with 2 Unknowns Registering Two Sets of 3DoF Data Probably the most simple registration problem involves registering two sets of 3 degrees of freedom (DoF) data. This type of data typically involves positional data composed of $x,y, z$ values. However, many of the techniques that follow can be adapted to higher (and lower) dimensional data easily. Here we assume that the 3DoF data from two systems are stored in matrices $\mathbf{A}=[a_1, a_2, ... ,a_n]$ and $\mathbf{B}=[b_1, b_2, ..., b_n]$ where 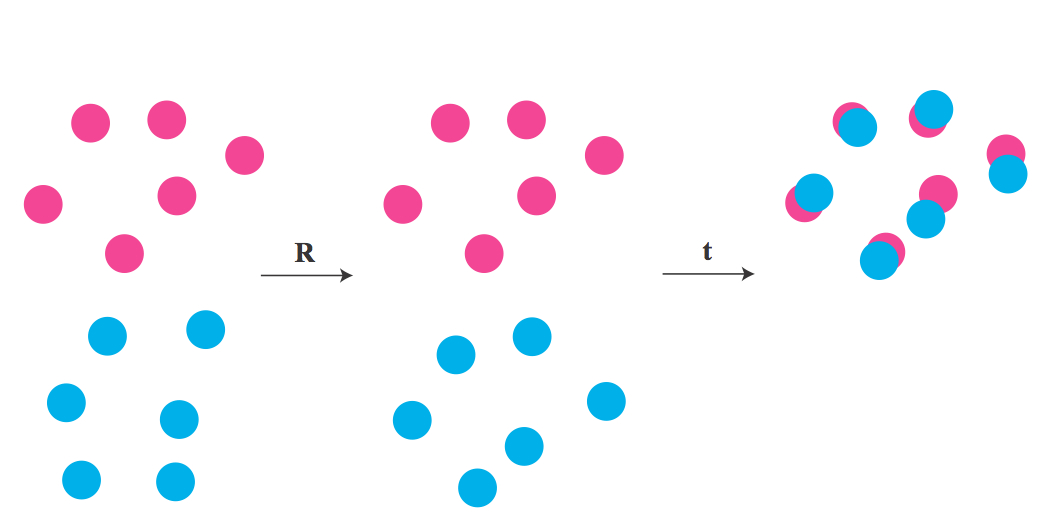
For example, in the picture above we have a set of blue dots $b_i$ and pink dots $a_i$ and we can see we have found a rotation $\mathbf{R}$ and translation $\mathbf{t}$ that best lines the points up. Mathematically we can express this as an optimization problem \[\min_{\mathbf{R},\mathbf{t}}\sum_{i=1}^n\|\mathbf{R}a_i + \mathbf{t}-b_i\|\] which basically minimizes the distance between the transformed points $a_i$ and $b_i$. There have been many closed form solutions to this problem which include:
Code has been included at the end of each reference. The first algorithm by Arun, Huang, and Blostein is probably the most famous. However, the formulation of this method requires $\mathbf R$ just to be an orthogonal matrix without enforcing $\textrm{det}( \mathbf{R})=1$. Thus, the $\mathbf{R}$ that the algorithm spits out may not be an actual rotation but instead a reflection. As a consequence, one has to be cautious when using this method. A similar problem comes around with the second algorithm by Horn. This methods takes into consideration the polar decomposition of a matrix. But again it does not require that $\textrm{det}( \mathbf{R})=1$; thus there may be problems. The third algorithm again by Horn uses quaternions and thus you do not have to worry about calculating reflections for $\mathbf R$ instead of rotations. However, in this algorithm there may be a problem with the solution since the derivation of the rotation representation for a quaternion is not unique. All the methods mentioned so far use the rotation $\mathbf R$ to to solve for the translation $\mathbf t$. A different formulation can be found in the fourth algorithm. This methods claims to be faster than the previous methods and is supported by the conclusions found in
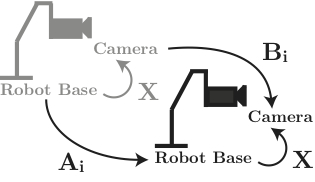
for large n but slowest for small n. However, this work found that the Horn method (second algorithm) is actually fastest for small n and slowest for large n. In either case, the first algorithm was actually the second fastest. In addition, with regards to stability, they found that the first algorithm to be most stable. As a result, we claim the first algorithm is best to use except for the fact that the rotation calculated may not be an actual rotation. The last algorithm constructs an easy fix to guarantee that $\mathbf R$ is indeed a rotation and thus we would recommend using the last algorithm by Umeyama when registering two sets of 3D points. Registering Two Sets of 6DoF Data with 1 Unknown For six degrees of freedom (6DoF) data not only do we have the positional data for an object but we also have the orientational data for the object. As a result, we have three degrees for the positional data ($x,y,z$) and three degrees for the orientational data ($r_x,r_y,r_z$). Typically, this data is formulated as a homogeneous matrix of the form \[\mathbf{H} = \left(\begin{array}{cc}\mathbf{R} & \mathbf{t}\\0&1\end{array}\right),\] where $\mathbf{R}$ is a 3x3 rotation matrix formulated from $\{r_x,r_y,r_z\}$ and $\mathbf{t}=(x,y,z)^T$ is a 3 dimensional column vector. Registering this type of data generally consists of two types: registration with 1 unknown and registration with 2 unknowns. This section will concentrate on the former, while the next section will concentrate on the latter. To begin, consider the two setups below:
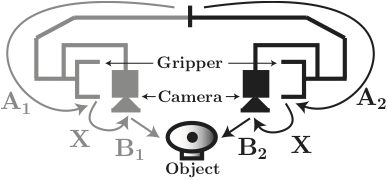
In both scenarios, we have 6DoF data that is collected from system $\mathbf{A}$ and reported as $\mathbf{A}_i$ and 6DoF data that is collected from system $\mathbf{B}$ and reported as $\mathbf{B}_i$. There is one unknown for each setup denoted as $\mathbf{X}$. Following the arrows from the first setup, we can easily see that \[\mathbf{A}_i\mathbf{X} = \mathbf{X}\mathbf{B}_i\] and for the second setup \[\mathbf{A}_1\mathbf{X}\mathbf{B}_1 = \mathbf{A}_2\mathbf{X}\mathbf{B}_2 \Leftrightarrow \mathbf{A}_2^{-1}\mathbf{A}_1\mathbf{X} = \mathbf{X}\mathbf{B}_2\mathbf{B}^{-1}\] As a result, both scenarios can be formulated as \[\mathbf{A}\mathbf{X}=\mathbf{X}\mathbf{B}\] There have been many closed-form solutions for these types of methods that can be broken down as separable solutions and simultaneous solutions. The separable solutions search for $\mathbf{X}$ by solving the orientational and positional components separately, while the simultaneous solutions search for $\mathbf{X}$ by solving for the orientational and positional componenets at the same time. More details of the pros and cons of the methods can be found here. Separable solutions include
Registering Two Sets of 6DoF Data with 2 Unknowns For this setup, we are working with 6DoF data but now we have two unknowns as shown in the figure below: 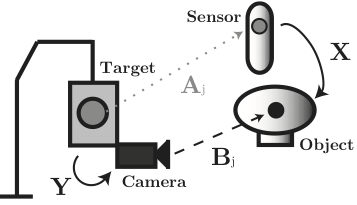
We have 6DoF data that is collected from system $\mathbf{A}$ and reported as $\mathbf{A}_i$ and 6DoF data that is collected from system $\mathbf{B}$ and reported as $\mathbf{B}_i$. There are two unknowns in this setup denoted as $\mathbf{X}$ and $\mathbf{Y}$. Following the arrows, we can easily see that \[\mathbf{A}_i\mathbf{X} = \mathbf{Y}\mathbf{B}_i\] which is of the form \[\mathbf{A}\mathbf{X} = \mathbf{Y}\mathbf{B}\] As with the one unknown case, there have been many closed-form solutions for these types of methods that can be broken down as separable solutions and simultaneous solutions. The separable solutions search for $\mathbf{X}$ and $\mathbf{Y}$ by solving the orientational and positional components separately, while the simultaneous solutions search for $\mathbf{X}$ and $\mathbf{Y}$ by solving for the orientational and positional componenets at the same time. More details of the pros and cons of the methods can be found here.
Simultaneous solutions include
| ||
| Copyright [2014] [Mili Shah] Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at http://www.apache.org/licenses/LICENSE-2.0 Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License. |